

- Chain-linked particles enable transport, navigation, and coordination – without sensors or central control
- A low-information, energy-efficient robotic system points to a new paradigm in collective robotics

▲ (From left) Dr. Kyungmin Son, M.S. candidate Kwanwoo Kim, and Professor Ho-Young Kim from the Department of Mechanical Engineering, College of Engineering, Seoul National University
Seoul National University College of Engineering announced that a joint research team from Seoul National University and Harvard University has developed a next-generation swarm robot system inspired by nature—capable of movement, exploration, transport, and cooperation, all without the need for precise sensors or centralized control.
The study was led by Professor Ho-Young Kim, Dr. Kyungmin Son, and master’s student Kwanwoo Kim at SNU’s Department of Mechanical Engineering, and Professor L. Mahadevan and Dr. Kimberly Bowal at Harvard. Their approach connects simple, active particles into chain-like structures that can carry out complex tasks without any advanced programming or artificial intelligence.
Traditional swarm robots—such as those made from drones or small individual bots—typically rely on high-tech components, like sophisticated sensors, wireless communication, and detailed control algorithms. While powerful, these systems often come with limitations in terms of size, material choice, cost, and environmental conditions.
In contrast, nature offers a different model. Just as ant colonies or groups of cells exhibit complex collective behaviors using only simple individual units. The research team created a new type of robot inspired by this phenomenon, known as "emergent collective behavior." Their solution, called the link-bot, connects small self-moving particles in a V-shaped chain formation that naturally gives rise to coordinated, lifelike movement—without any embedded intelligence.
These link-bots use simple mechanical constraints to control how each particle moves or rotates. By adjusting the geometry of the links, the system can adapt its shape and behavior to suit different tasks or environments.
The team demonstrated that link-bots can perform a variety of actions—such as moving forward, stopping, and changing direction—by simply modifying their link structures. They can squeeze through tight gaps, block openings, and even surround and carry objects. Multiple link-bots can also work together to accomplish tasks too difficult for a single robot.
To better understand and predict these behaviors, the researchers developed a computational model that simulates how different chain designs and particle counts affect movement. This allows for systematic exploration of the link-bot’s mechanical logic.
The team showed that these robots can perform sequences of complex tasks—like searching, transporting, and cooperating—without relying on sensors or centralized control. This opens new possibilities for low-cost, energy-efficient robotics in disaster response, rough-terrain logistics, environmental monitoring, and beyond.
This groundbreaking work was published in Science Advances on May 9, highlighting a promising new direction for the future of swarm robotics.
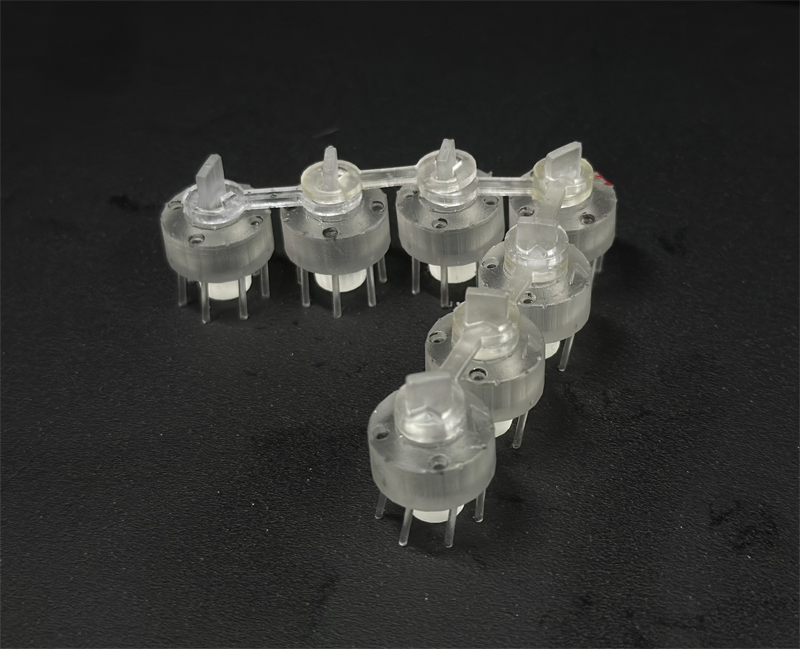
▲ Picture 1. A V-shaped link-bot composed of self-propelled particles connected through chain-like links.
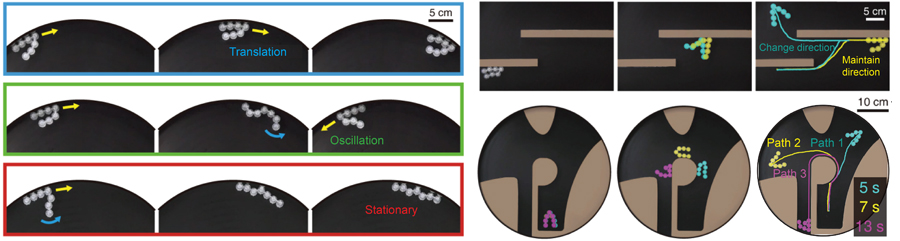
▲ Picture 2. Movement of linkbots showing different gaits and directions depending on their link configuration.
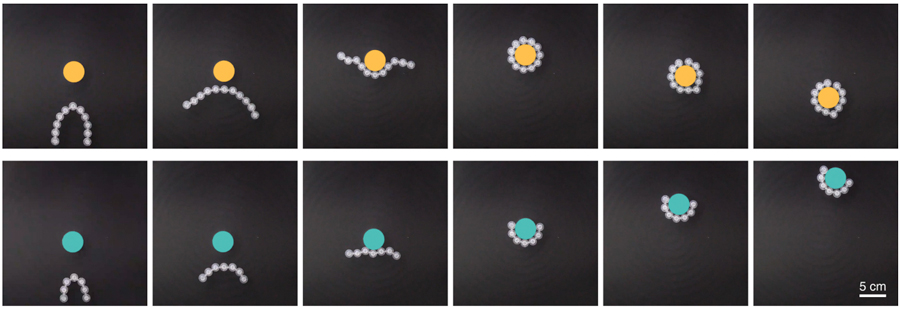
▲ Picture 3. (Top) Link-bot wrapping around and retrieving an object. (Bottom) Link-bot transporting an object over a distance.
[Reference Materials]
- Paper/Journal : “Emergent functional dynamics of link-bots”, Science Advances
- DOI : https://www.science.org/doi/10.1126/sciadv.adu8326
[Contact Information]
Professor Ho-Young Kim, Department of Mechanical Engineering, Seoul National University / hyk@snu.ac.kr